#Product Trends
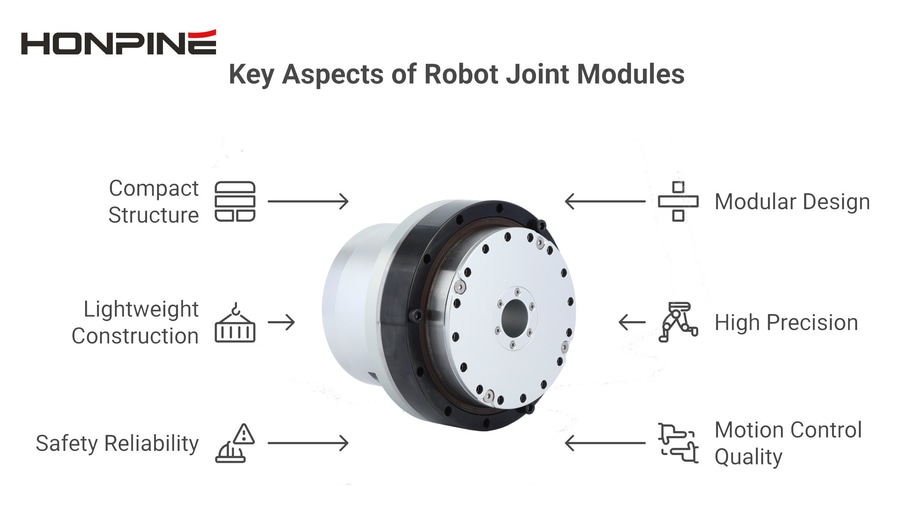
Why the Joint Module is Called the "Power Heart" of the Robot
Robot joints are one of the most basic components that constitute the mechanical structure of the robot.
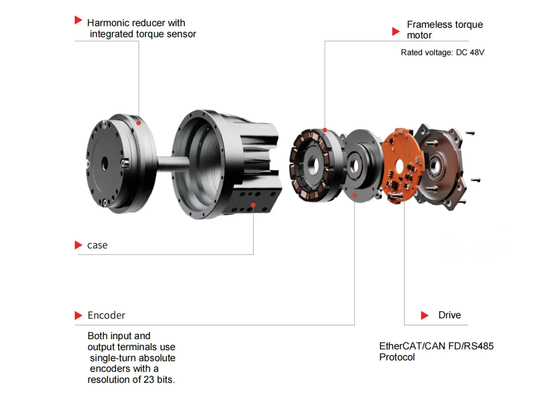
The Composition and Function of the Joint Module
Magnetoelectric Encoder:
The main part is composed of a read head board and a magnetic grid. The magnetic grid is engraved with small magnetic poles, and the sensor detects the change of the magnetic field when the disk rotates. The read head board chip can be a Hall-effect device that senses voltage changes, or a magnetoresistive device that senses magnetic field changes. The signal is multiplied, divided or interpolated to produce the required output to achieve the measurement purpose.
Photoelectric Encoder:
It is composed of a light source, an optical code disk and a photosensitive element. The grating is actually a disk engraved with transparent and opaque lines. The light flux received by the photosensitive element changes synchronously with the transparent lines. The output waveform of the photosensitive element is shaped and becomes a pulse signal. One pulse is output for each revolution. According to the change of the pulse, the displacement of the equipment can be accurately measured and controlled to reflect the current speed of the equipment.
Incremental Encoder:
The incremental encoder directly uses the principle of photoelectric conversion to output three sets of square wave pulses A, B and Z phases; the phase difference between A and B pulses is 90°, so that the direction of rotation can be easily determined, and the Z phase is one pulse per rotation, which is used for reference point positioning. Its advantages are a simple principle and structure, an average mechanical life of more than tens of thousands of hours, strong anti-interference ability, high reliability, and suitability for long-distance transmission. Its disadvantage is that it cannot output the absolute position information of the shaft rotation.
Absolute Encoder:
The absolute encoder is a sensor that directly outputs digital data. There are several concentric code disks on its circular code disk along the radial direction. Each track is composed of light-transmitting and light-impermeable sectors. The number of sectors of adjacent code tracks is doubled. The number of code tracks on the code disk is the number of bits of its binary digits. On one side of the code disk is the light source, and on the other side there is a photosensitive element corresponding to each code track. When the code disk is in different positions, each photosensitive element converts the corresponding level signal according to whether it is illuminated or not, forming a binary number. The characteristic of this encoder is that it does not require a counter, and a fixed digital code corresponding to the position can be read at any position of the rotating shaft. Obviously, the more code tracks there are, the greater the accuracy.
DC Drive and Temperature Sensor
The DC drive can change the motor voltage to control the brushless DC speed.
(Control motor rotation)
The temperature sensor can sense the temperature and convert it into a usable output signal.
(Collect current temperature feedback)