#Product Trends
Linear Actuators vs Rotary Actuators: The Core Choice for Humanoid Robot Joints
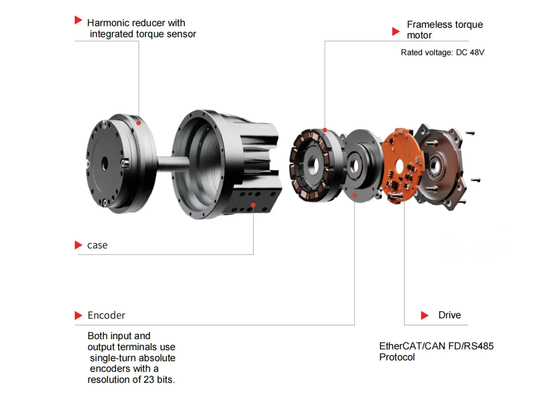
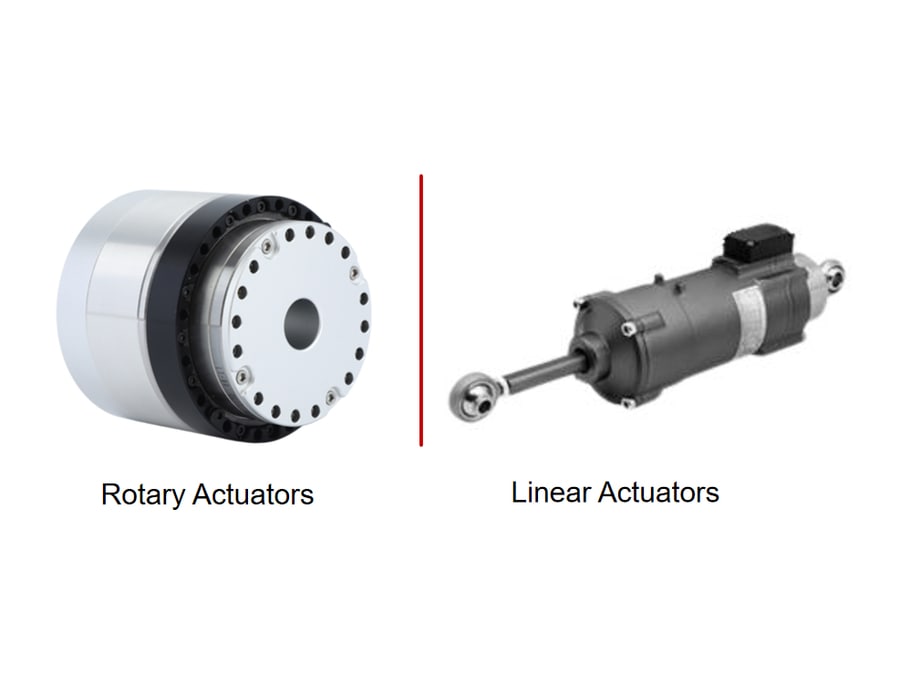
The robot joint module is the core hardware of humanoid robots, currently mainly divided into two major categories: rotary and linear. In humanoid robot designs, the choice often involves trade-offs based on the application scenario and manufacturing
Humanoid robot joint modules can be broadly categorized into rotary and linear actuators, each suited to specific applications and load requirements. Rotary actuators, often using harmonic drives, planetary or cycloidal reducers, provide high torque, wide-angle rotation, strong dynamic performance, and high integration, making them ideal for shoulders, hips, and waist joints. Linear actuators, using planetary roller screws or ball screws, convert rotational motion into linear motion and excel in precision and stiffness for joints with small motion ranges, such as knees, elbows, and ankles, but have lower dynamic responsiveness and higher integration costs. Ultimately, both actuator types have distinct advantages depending on motion requirements, structural constraints, and performance priorities, with rotary actuators—especially harmonic drive solutions—currently being the mainstream choice for humanoid robot joint design.