#Product Trends
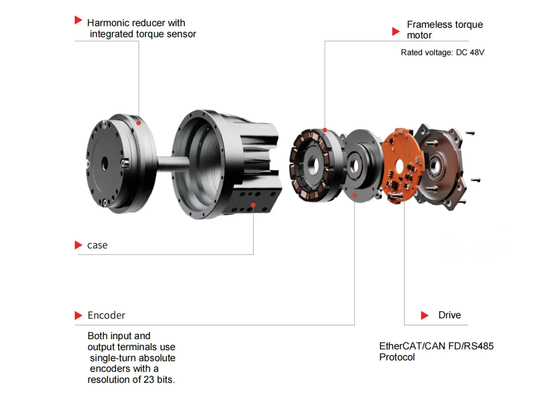
EtherCAT vs. CAN for Harmonic Drive Motors: A Technical Comparison
EtherCAT far outperforms CAN with higher bandwidth, superior real-time synchronization, and stable high-speed communication, making it the mainstream choice for controlling harmonic drive motors in advanced robotics.
In robotic harmonic drive motor control, communication protocols directly affect precision and response performance. While CAN is simple and low-cost, its 1 Mbps bandwidth, susceptibility to bus collisions, limited synchronization ability, and fluctuating communication cycles restrict it to low-demand applications. EtherCAT, by contrast, offers 100 Mbps high-speed transmission, microsecond-level distributed clock synchronization, stable 4 kHz update rates, flexible wiring options, and strong anti-interference capability. These advantages enable precise, real-time multi-motor coordination in complex robotic systems. As a result, EtherCAT has become the dominant protocol in high-end robotics, while CAN is mainly used in lower-performance or auxiliary networks.