#Product Trends
Mastering PID Control: The Hidden Engine Behind Robotic Joint Precision
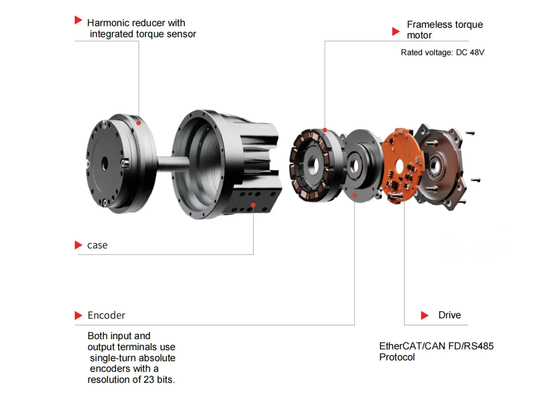
PID control is the core technology enabling robotic joints to achieve stable, accurate, and fast motion, and proper tuning of P, I, and D parameters—following the inner-to-outer current, speed, and position loop structure—is essential for high precis
PID control enables precise robotic joint motion through the coordinated action of proportional, integral, and derivative terms, where P determines responsiveness, I eliminates steady-state error, and D suppresses overshoot and oscillation. Robotic joint modules typically use a three-loop nested structure—current, speed, and position loops—which must be tuned from the inner loop outward to ensure stability. Although there is no universal tuning formula, understanding the core PID logic and adapting parameters to load characteristics and application requirements allows engineers to optimize joint performance, achieving fast response, high accuracy, and reliable control.