#Product Trends
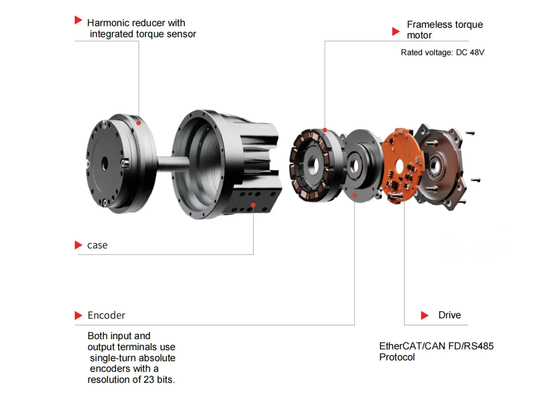
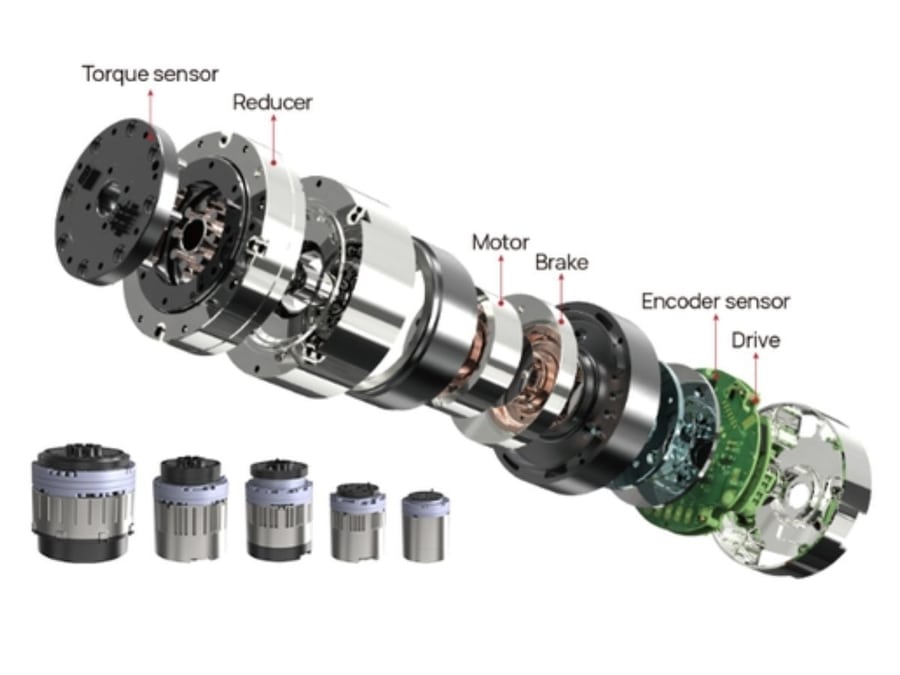
Embedded vs. External Torque Sensors in Robotic Joints Module: Engineering Trade-offs and Future Trends
This article explores the engineering trade-offs between embedded and external torque sensors in robotic joint modules, comparing their impact on compactness, reliability, dynamic performance, maintainability, and future applications in humanoid and
As humanoid robots and collaborative robots continue evolving, torque sensors have become essential for achieving precise force control and compliant interaction. This article analyzes the two dominant torque sensing architectures used in robotic joint modules: embedded torque sensors, which are deeply integrated into the joint structure for compactness, high reliability, and superior dynamic performance, and external torque sensors, which offer greater flexibility, easier maintenance, and strong suitability for research and validation environments. By comparing their implementation methods, advantages, limitations, and application scenarios, the article highlights the key engineering trade-offs between integration, scalability, maintainability, and performance, helping robotics engineers select the most suitable sensing solution for next-generation robotic systems.