#Industry News
What is mobile mapping?
A complete beginners guide
Mobile mapping is one of the most exciting uses for localisation technology – particularly GNSS/INS technology like ours. This blog is designed to be the ultimate primer on mobile mapping for anyone looking to learn more about mobile mapping technology and mapping systems such as mobile LiDAR. So, what is mobile mapping?
What is mobile mapping?
Any activity that involves surveying something from a moving vehicle is a type of mobile mapping. Broadly speaking, mobile mapping is grouped into land-based and aerial mapping activities. Land-based mobile mapping, also sometimes called road-based mobile mapping, is where the survey is done from a car. The Google Streetview cars are probably one of the most public examples of road-based mobile mapping.
Aerial mapping, of course, is surveying done from the air. This might be from a small quad-copter drone, or from a larger aircraft, either manned or unmanned.
Key mobile mapping technology
In any mobile mapping payload (which is the name for the collection of sensors and technology used for the survey), there are some common components:
1. The sensors used to gather the survey data
2. The localisation solution
The process of combining those two datasets is known as georeferencing. Once the survey data has been georeferenced, it has been given a fixed position on the earth, which means that data can be used for its intended purpose.
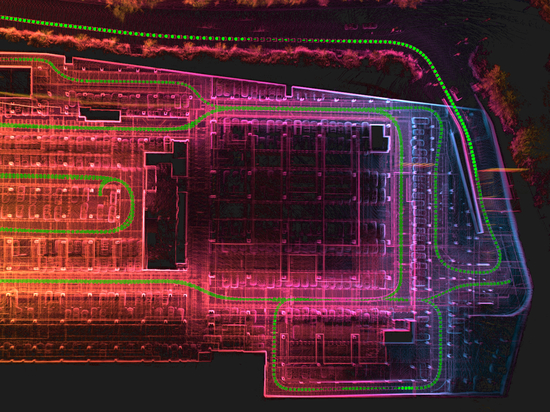
A wide range of sensors can be used for the survey. The most common historically has been the camera, creating a photographic image as the survey result. More recently, LiDAR (Light Detection And Ranging) has become a popular method of surveying. LiDAR uses lasers to measure the distance between the sensor and objects in the surrounding environment, producing millions (or even billions) of “points” which make up the survey. The final output from a LiDAR is known as a point cloud, which resembles a 3D model of the area surveyed.
Beyond that, almost any sensor can be used for surveying. Radar and hyperspectral imaging are often used, but we have worked with customers to help them georeference data from a range of different sensors including gas sensing equipment in the past. As long as you can georeference the data with your localisation technology, you can use your sensor in a survey.
Mobile mapping localisation
These days, the most popular method of localisation for mobile mapping is a combination of GNSS data and an IMU (inertial measurement unit).
GNSS stands for Global Navigation Satellite System and refers to constellations of satellites in space that provide position data. GPS, for instance, is an example of GNSS.
Learn more about GNSS
An IMU is a collection of gyroscopes and accelerometers that measure changes in velocity, acceleration, and angular momentum, which are used to estimate the heading, speed, and orientation (among other things) of an object. An IMU combined with GNSS data is usually referred to as a GNSS-aided inertial navigation system, or GNSS/INS. Combining the two makes the system more robust – the INS allows you to identify any errors in your satellite data, perhaps caused by a drop in satellite coverage, while the GNSS corrects the gradual position drift that any IMU is subject to.
How mobile mapping works
Typically, the mobile mapping process involves the following steps:
1. Setup: build your surveying payload, making sure your sensors are tightly integrated to give you the best quality output.
2. Gather the data: conduct your survey, whether on land or in the air, gathering both survey data and localisation data in real time.
3. Processing: once the data is gathered, you need to combine the two datasets to produce a final result. There are some sub-steps in here: you will likely run some post-processing algorithms on your localisation data in order to maximise the accuracy of that data, and then you will run a separate georeferencing step where the position data is combined with the survey data.
The specifics of the workflow will vary depending on the sensor you are using. For instance, if you are using a mobile LiDAR device, your will need to add in a boresight calibration step before you survey to precisely align the LiDAR scanner and your GNSS/INS, to avoid blurry images.