#Product Trends
Discover how the RT3000 v4 is redefining mobile mapping
Enhance your mobile mapping accuracy with OXTS
While precision isn’t the only factor that matters when it comes to choosing a mobile mapping product, it is the single most important factor. Other things like ease of integration and robustness are important, but if it can’t deliver the required level of accuracy, a GNSS/INS won’t be fit for purpose.
In this blog, we’re taking a look at our flagship GNSS/INS, the RT3000 v4. It’s the most accurate GNSS/INS we’ve ever made, and it’s ideal for high-precision mobile mapping projects where accuracy is essential.
How the RT3000 v4 delivers high-precision mobile mapping accuracy
The RT3000 v4 uses the most advanced technology to deliver a range of improvements over previous models such as the Survey+. Here are the key features of interest to mobile mappers:
Higher-grade IMU options
The RT3000 v4 uses IMU10 technology, our most advanced IMU technology to date. It delivers greater precision than our previous IMUs, giving you even more precise calculations around heading, position, and orientation – up to a 90% improvement over our previous models. In fact, for mappers this translates into less position drift over time, and more accurate maps.
Multi-sensor fusion support
Additional connectivity options, PTP/gPTP synchronisation, and our Generic Aiding Data Interface make it possible to integrate a wide variety of sensors into the RT3000 v4. Customers have already integrated wheel speed sensors, LiDAR, radar, and cameras into their devices – and we are actively working on new integrations all the time to boost our high-precision mobile mapping capabilities.
Multi-sensor fusion enables mobile mappers to get accurate data in environments they previously couldn’t, including under trees and in cities where GNSS signals are partially blocked, and even underground where there’s no GNSS at all. By feeding additional sensor data into the RT3000 v4’s navigation engine, it is possible to use that data to stabilise position drift in the absense of GNSS.
6x faster warmup
The RT3000 v4 can initialise in under three minutes – six times faster than older models. So you can spend less time driving around a car park to warm up, and more time surveying. Not only can you initialise in under a minute, you can do so with less dynamic movements than before.
Benefits for mobile mapping
Protect accuracy for longer
When surveying hundreds of miles of roads, or hundreds of square kilometres of land from the air, position drift is one of your worst enemies. The RT3000 v4 has greatly reduced drift compared to previous models, meaning you can survey larger spaces and expect the same quality of data throughout.
Survey in more places than ever before
Multi-sensor fusion support means that you can integrate LiDAR, radar, cameras and other sensors to get accurate localisation data anywhere. Even underground, an integrated LiDAR can still give you centimetre-level accuracy. Best of all, using the RT3000 v4 as the centrepiece of your payload means that you can transition between environments with, and without GNSS, seamlessly.
Add more value
Ultimately, as a mobile mapper the quality of your final output is what determines your value to your customers – whether they are internal or external. The more precise your measurements, the greater their value. It’s important to remember though that not every project requires cm-level accuracy and we do have other more cost-effective options if accuracy is further down the priority list.
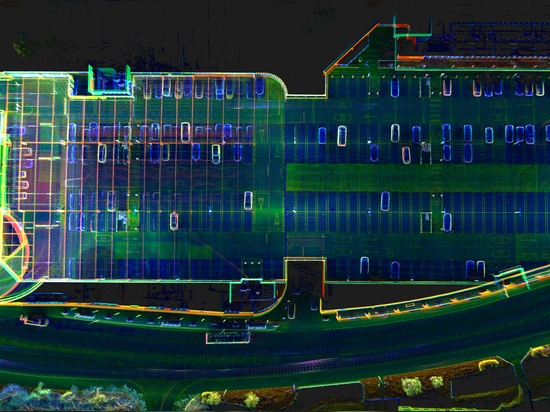
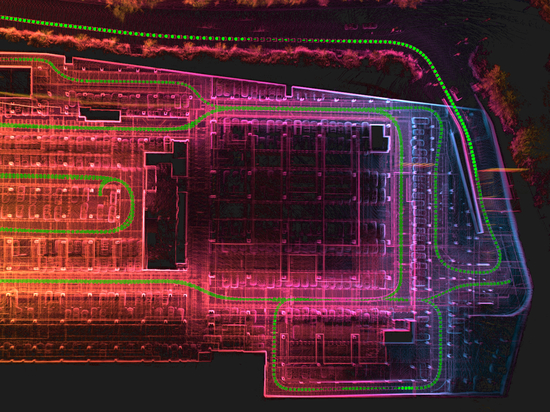
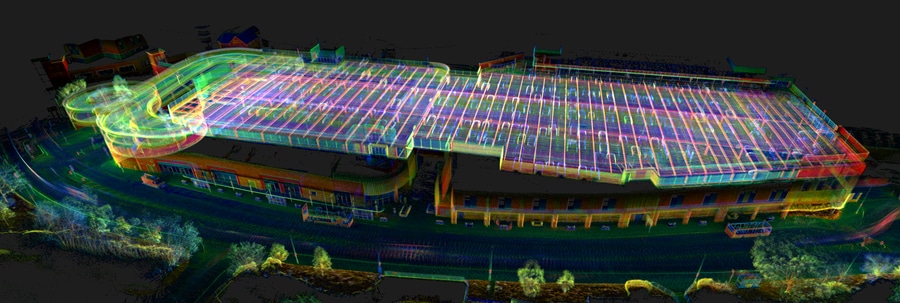
This is where OXTS customers often get a lot of value out of our georeferencing software, which makes it easy to combine LiDAR and GNSS/INS data while also improving the overall quality of the point cloud.