#Product Trends
Optimization Solution for Screw Tightening Pain Points on a Robot Vacuum Cleaner Production Line
Screw Tightening Machine, electric screwdriver with data traceability, electric screwdriver with angle control
I. Core Pain Points of Traditional Fastening Processes on Robot Vacuum Cleaner Assembly Lines
In the automated assembly process of a complete robot vacuum cleaner, chassis fastening is a critical process affecting product quality and production takt time. The chassis of a robot vacuum cleaner is often an irregular, circular ABS structure. Inside, it integrates precision components like drive motors, capacitors, and formed wiring harnesses. Fastening points are scattered, and the workpiece structure is special. Traditional production commonly relies on manual screw tightening, which leads to long-standing production problems such as poor accuracy, low efficiency, no data traceability, and difficult changeovers, severely restricting production line automation upgrades.
1. Difficulty in alignment during manual tightening.
The irregular structure of the robot vacuum cleaner chassis is complex. Fastening points are scattered on the curved sides and the central motor position. During manual tightening, operators need to repeatedly move the workpiece and adjust their working angle. Aligning eccentric screws takes a long time and has low precision. The force applied by operators is inconsistent, easily leading to problems like floating screws or stripped threads. Frequent operation also risks bumping and scratching the chassis shell. In high-volume mass production scenarios, the product defect rate remains high, significantly increasing rework and scrap costs.
2. Poor adaptability of fixed fixtures restricts production line takt time.
Traditional fastening stations use fixed positioning molds that are dedicated to a single machine model, resulting in poor adaptability. The robot vacuum cleaner industry has a fast product iteration speed. Once a new model optimizes the chassis structure, the original tooling is scrapped directly, requiring new mold development and processing. During the mold changeover, the entire assembly line must stop and wait, severely impacting overall production efficiency.
3. Traditional manual tightening processes cannot meet intelligent quality inspection requirements.
Traditional manual tightening relies entirely on the operator's experience to control force, lacking standardized torque adjustment functionality and data acquisition modules. This makes it impossible to adapt to differentiated tightening processes for screws in different positions on a robot vacuum cleaner. Furthermore, no data is retained during production. Inline quality inspections cannot verify the tightening parameters for each screw. If a screw comes loose after the product ships, the production end cannot trace back the station data or identify the root cause, failing to meet the refined quality control and after-sales traceability standards of the smart appliance industry.
II. Danikor's Targeted On-Site Solution Using a Servo Screw Tightening Machine
To address the fastening difficulties on the robot vacuum cleaner assembly line, Danikor adopts a complete solution combining a fixed-position electric screwdriver with a servo tightening module. This solution replaces manual tightening and solves traditional production pain points across six dimensions: efficiency, structure, process, quality, flexibility, and data.
Improved Tightening Efficiency, Matching the Continuous Takt Time of the Production Line
The module uses servo electric drive closed-loop control. Compared to traditional pneumatic cylinder-driven modules, the combined takt time for screw feeding and fastening is improved by 25% to 30%. Facing the scenario of dense, multi-point fastening on the circular robot chassis, the servo module enables the fixed electric screwdriver to switch positions quickly, eliminating the wasted time from cylinder start/stop buffering. The fastening time per chassis is significantly reduced, and the equipment's operational rhythm matches the line's transport takt time.
Streamlined and Compact Structure, Optimizing Layout in Tight Stations
After structural optimization, the overall footprint of the servo module is reduced by 43% compared to traditional pneumatic cylinder modules. The assembly station for robot vacuum cleaners has limited space. The compact module can be mounted directly above the assembly line, requiring no major modifications to the frame structure, thus saving space.
Flexible and Adjustable Downward Pressure, Eliminating Damage to the Plastic Housing and Screw Threads
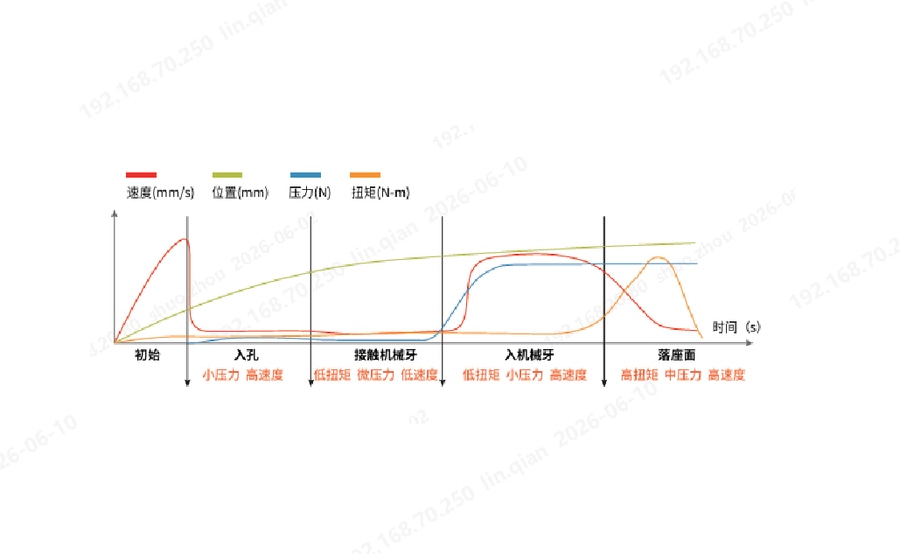
The module's downward pressure is dynamically controllable in real-time throughout the process, unlike the rigid impact caused by old spring-type pressure systems. The robot vacuum cleaner chassis is made of ABS plastic. During fastening, the module adjusts the load according to a segmented logic: low pressure and high speed for entering the hole, followed by target pressure for engaging the thread. There is no instantaneous impact load throughout the process, effectively preventing stripped threads and cracked or crushed housings from being scrapped.
Flexible Obstacle Avoidance Control, Adapting to Components at Different Heights Inside the Chassis
The screw suction tube can pause fastening at any point within its maximum stroke of 250mm, enabling flexible obstacle avoidance. Inside the robot chassis, components like motors and capacitors are arranged at varying heights, leading to significant height differences between fastening points. The module's obstacle avoidance capability allows it to automatically go around protruding workpiece components. This eliminates the need for additional Z-axis mechanical components for avoidance, reducing equipment hardware costs while simplifying the control program.
Float (Seating) Error Prevention Monitoring, Intercepting Floating Screw Defects Upstream
Leveraging the servo's built-in position detection function, the module can monitor abnormal screw float (incomplete seating) in real time without needing an additional displacement sensor. In mass production of robot vacuum cleaners, screw float is a frequent quality defect. The module collects position data in real-time during the tightening stroke. If a screw is detected as not fully seated (floating), the equipment immediately issues an alarm and stops to reject the defective part, reducing the output of reworked products at the source.
Highly Integrated System, Achieving Closed-Loop Control with Full Process Data
The servo module integrates a collection unit for all key elements: speed, position, pressure, torque, and time. Combined with the fixed electric screwdriver, it forms an integrated tightening unit. Data from the entire tightening process is stored in real-time and can be seamlessly connected to the factory's MES system. The system completely retains the tightening process curve for each individual screw, compensating for the lack of data retention in manual tightening. This meets the quality control standards for finished product traceability and after-sales fault diagnosis.
Furthermore, when product iterations or model changes occur, there is no need to disassemble or adjust the mounting position of the fixed electric screwdriver. Only the module's motion coordinate program needs to be modified within the servo control system. A single set of equipment can be compatible with the production of multiple different specification circular chassis, eliminating the high costs of production line stoppages for traditional tooling changeovers and repeated mold development.
Danikor's high-precision servo tightening automation solutions are deeply applied in smart small appliance assembly scenarios. In addition to the chassis fastening station for robot vacuum cleaners, this solution can be widely adapted to fastening processes for various irregular, precision components such as vacuum cleaner drive motors, main control housings for small appliances, and smart wearable devices. It can provide home appliance manufacturers with both standardized equipment and non-standard customized overall tightening solutions, assisting in the automation and intelligent upgrade of production lines.