Posted on 2/17/2026
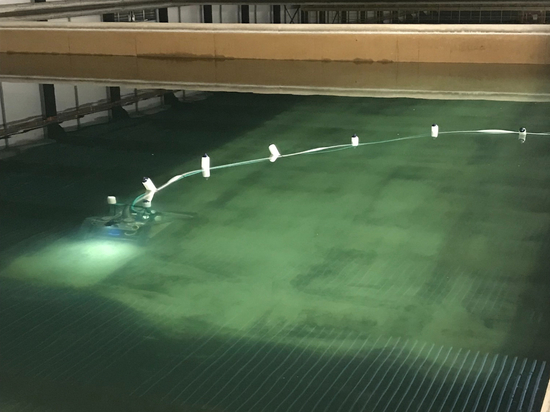
Exploring automated sand filter cleaning to maintain water output while reducing labor and operational downtime
Thames Water is the United Kingdom’s largest water utility, serving over 15 million residents and managing extensive infrastructure, including reservoirs, treatment plants, pipelines, tanks, and basins. Across this network, maintaining consistent water output and water quality requires continuous management of sediment buildup, algae blooms, and aging concrete linings—fa...