Posted on 7/29/2026
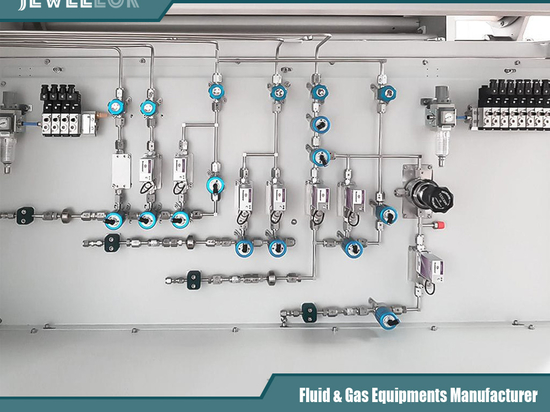
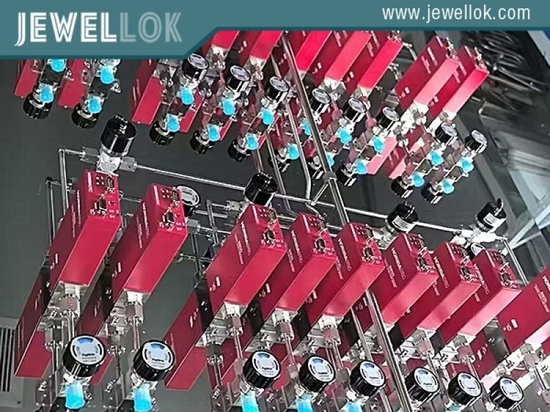
VMB Valve Manifold Box And Panel Gas Cabinet, BSGS Gas Cabinets, TMA Gas Cabinets, Scrubber Tail Gas Treatment Cabinets
How to Select the Right Valve Manifold Box for Your Application
In the intricate world of industrial fluid control—spanning process automation, chemical handling, water treatment, and manufacturing—precision, reliability, and safety are paramount. At the heart of many sophisticated fluid control systems lies a critical, yet sometimes under-specified component: the valve...